|
:●◯●・・・
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>> >>>>> >>>> >>>>>>>>>>>>>>> |
●「わたし」は世界有数のFWとして、相手陣内にぽっかりと空いた裏のスペースに猛然と駆け出している。自軍の、同じく世界有数のMFが適切なタイミングで適切な軌道のボールを預けてくれることを確信しながら。このとき、世界有数のFWであるところの「わたし」は、そのMFの位置から「わたし」がどのような視界で捉えられているか、そして、フィールド内では死角となっているそのスペースが、そこへと一直線に向かっている「わたし」を陽に含みながら、テレビカメラの画角の中で明け透けに捉えられている様(さま)を、その<具体的なビジュアル>を、正確性を欠きながらも "深く" イメージすることができる。 ● この仮想的な視点に位置しているものは、(「わたし」が世界有数の誰某であるにせよないにせよ)前景化している「わたし」の斜め後ろの方で、しかし決して振り落とされることなく並走している、もう一人の重要な「わたし」のことであり、そうした複数の「わたし」の総体的な効果として、「いま・ここ・じぶん」のリアリティーは成立している、と、このように考えることはできないだろうか。この<斜め後ろにいる自分>を意識空間に引っ張り出してくること、そして、そのようなもう一人の自分との緩やかな対面を通じて、<わたし>がより奥行きのある<わたし>へと再編成されていくこと。小鷹研究室は、HMD技術の<仕様外使用>によって、こうした「新しい人間像」を探り当てることに強い関心を持っている。そして、これは実に魅惑的なプロジェクトである。 |
|
→←→←→←→ →←→←→←→←→←→ →←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→→←→→←→ →←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→ →←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→←→ →←→←→←→←→←→← →←→←→←→←→←→←→←→←→←→←←→ →←→←→←→ |
● 以上の問題を考えるにあたって、HMDにおける身体の運用の様々な水準(sense of self / sense of agency / body ownership)に関わる問題と、 幽体離脱(out of body experience)の科学的な取り扱いを理解しておくことは極めて重要である. 関心のある方は, 拙文ではあるが, 以下の文献を参考にされたい. |

- Kenri Kodaka, Koyo Mori: “Self-umbrelling turns over subjective direction of gravity” ACM Siggraph Asia 2018, Virtual & Augumented Reality, Tokyo, 2018.12 [DOI]
- 小鷹研理:「HMDによる構成的空間を舞台とした「三人称的自己」の顕在化」, 2018年度人工知能学会全国大会, 鹿児島, 2018.6(招待講演, Organized Session:「プロジェクション科学」の展開と発展) [PDF]
- 研究室展示『からだは戦場だよ2018 人間は考えヌ頭部である』, やながせ倉庫・ビッカフェ, 2018.1.27-28 [WEB]
- 2018.12 「嗅覚や身体感覚に訴える展示多数、アイディア満載のSIGGRAPH Asia 2018 体験ブースレポ」 [Mogura VR]
- 2018.12 「SIGGRAPH Asia 2018 TOKYOレポート7(「VR / AR」その3)」 [VRon WEBMEDIA]
- 2018.12 「siggraph asia 2018(2018.12.5-7)への参加」 [小鷹研blog]
- 2019.01 「Automated Anime and VR at SIGGRAPH Asia 2018」 [Animation World Network]
- 2018.03 古谷利裕, 「幽体離脱の芸術論」への助走 メディウムスペシフィックではないフォーマリズムへ向けて [ÉKRITS]
(△ △ △ 第4章で「Self-umbrelling」の体験に関する言及があります. )
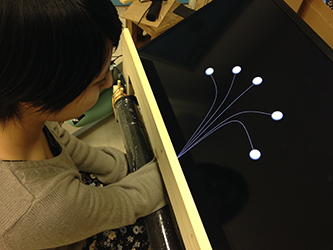
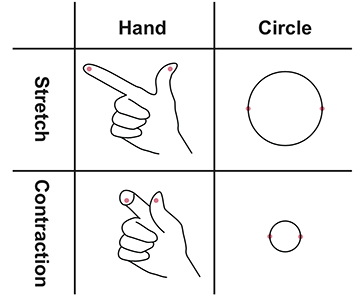
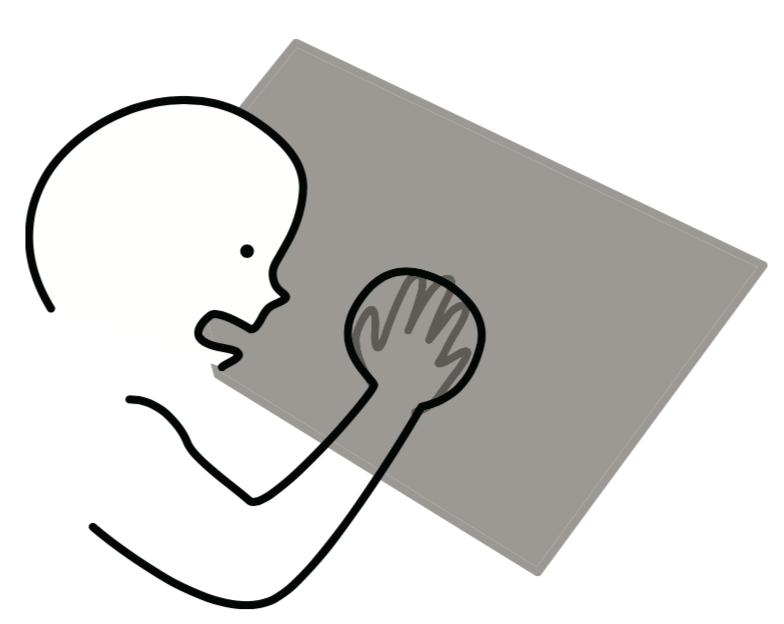
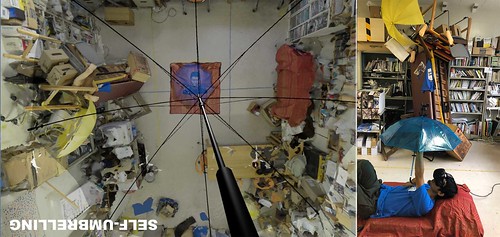
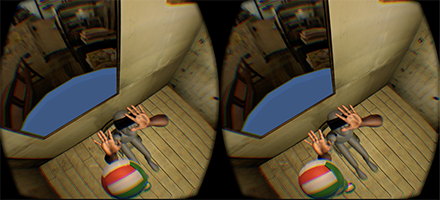
今日から、定期的に「からだは戦場だよ2018」(27・28)の出し物の予告をします。まずは「セルフ・アンブレリング(重力反転計画α)」というHMD装置について。映像の通り、寝ている自分(身体的自己)が傘を開くことで、それを上方から見下ろしている自分(視点的自己)が上に吹き上げられていきます。 pic.twitter.com/bQiP6wiidK
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
この装置は、副題の通り、主に認知科学的な関心(重力の知覚変調)から発想されたものです。(同時並行的に進めている)心理実験によれば、どうやら、仰向け状態というのは、知覚される重力の方向性において強力な不定性がつきまとっているらしい。
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
つまり、寝ている状態の自分の背後に、無意識に、うつ伏せの(自分)が潜んでいる、というわけです。そして、その(自分)が、寝ている時に空を飛んだり、稀に体外離脱したりするのではないか、、という仮説について、僕は真剣に考えている。
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
これは単なる思い付きではなく、去年発表した、Recursive Function Spaceにおいて、観られている(自分)の表象が、時折、「自分の本来あるべき場所」として強烈に立ち現れてくる、、そのような空間関係のパターンを考えて行った際に帰着する、(僕にとってはとても蓋然性の高い)一つのアイデアです。
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
去年の戦場で初めて発表したRFSは、11月のSiggraph Asia(バンコク)において、寝ているバージョンへとマイナーチェンジしました。そして、ここでの反応はある意味では狙い通り(oh-my-god)でした。ここで、RFSで時折侵入してきた「アバターの不気味さ」が、重力と密接の関係があることに確信を得た。 pic.twitter.com/JREgt1yQXR
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
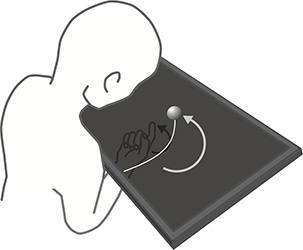
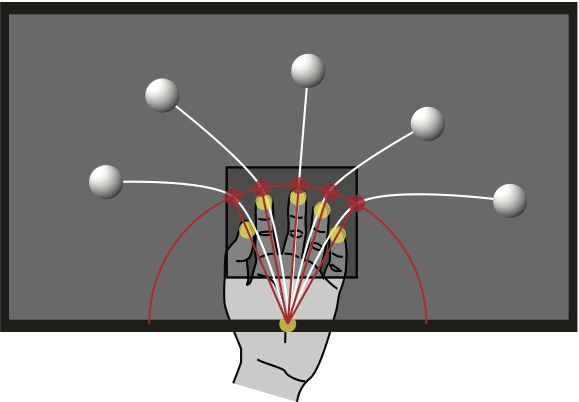
さて、「Self-Umbrelling」は、RFSからの流れと2年前に信田くんと発表した「I am a volleyball tossed by my hands」からの流れとの合流地点でもあります。「幽体バレボ」は、発想は面白かったけど、Leap Motionの性能に限界があり、自分が自分にトスされる感覚を安定して享受できなかった。 pic.twitter.com/hgfAEn1Z1f
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
(だから、これは「幽体バレボ」のリベンジでもある。幸い、傘の開いた閉じたは、安定してセンシングすることができる)メディア空間の中で、自分の生々しい身体の感触にアクセスするために、主語と目的語に「自分」が同時に代入されるような中動態的構造をインタラクション構造として埋め込むこと。
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
「主体感を高めて自他の一体感高めたつもりが自分汁高じてるだけなんじゃないの」的なシステムからは一線を画しているつもりです。主体感の喪失の危機に際して、初めて自も他も偶有的な眼差しで眺めることができる、僕はそういう気持ちでやってるし、「Self-Umbrelling」はそういう体験だと思ってる。
— 「」kenrikodaka (@kenrikodaka) 2018年1月22日
--- Only compatible with PC browser.
|
INTRODUCTION Limitation of body ownership projection
When designing an interaction between an avatar and a player in the head-mounted display (HMD) space, it is important to consider that what happens around the avatar is felt to happen directly around the player him- or herself. One resolution for interaction design is to apply the paradigm of the body ownership illusion, which is famous for the rubber hand illusion (Botvinick et al, 1998) (RHI), where visuo-tactile correlation between a rubber hand and a physical hand yields a compulsory feeling that the rubber hand is his/her own hand. The full-body illusion (Salomon et al, 2013) (FBI) applies the RHI experience to the whole body, although the FBI has some significant difficulties regarding the flexibility of designing a spatial relationship between the avatar and the player. Specifically, the avatar in HMD space should be anatomically congruent with the whole physical body. Consequently, the player is obliged to look at the back of the avatar; we cannot look face to face at an avatar during the FBI. In addition, body ownership is only influential within the "peri-personal space" (around 1-2 m) from the core of the whole body (Serino et al, 2016). It is thus impossible to project body ownership to the avatar in a general-purpose HMD interaction. We then need to find a different way of accepting the avatar as ourselves in a more flexible spatial range. Out-of-body experience
Our team has focused on the out-of-body experience (OBE) as a clue to finding an alternative approach to body-image projection onto avatars in HMD interaction. Recursive function space (Kodaka and Mori, 2017) holds such an experience, as it enables the player to look at their own head from the controller which they holds with their right or left hand. The OBE spatially separates the perspective from the physical body, which the individual looks at from somewhere else. Importantly, the identification with the seen body is not completely spoiled even during this separation (Blanke 2005). It is thus likely that applying the OBE's structure to designing the relation between a player and an avatar improves the player's physical sympathy for what is happening around the avatar. A sense of gravity is a critical factor in producing an OBE-like feeling. Specifically, the typical OBE (more than 70%) occurs while lying on one's back and seeing oneself from above the physical body (Mezinger, 2012). This means that the subjective direction of gravity during the OBE corresponds to that in a prone posture, even though the individual is physically in a supine posture. Turning over the subjective direction of gravity is thus required to yield the typical OBE. Interestingly, such a subjective reversal of gravity was reported in laboratory conditions (Ionta, 2011) (during FBI) and a clinical situation, as well as during micro gravity situations such as parabolic flight (Graybiel, 1967). This suggests that being in a supine posture works favorably when creating an illusory sense of gravity as though looking down toward the ground from above. In this sense, simulating the visual reversal of perspective in the supine situation is significant to examine the cognitive mechanism underlying the OBE. 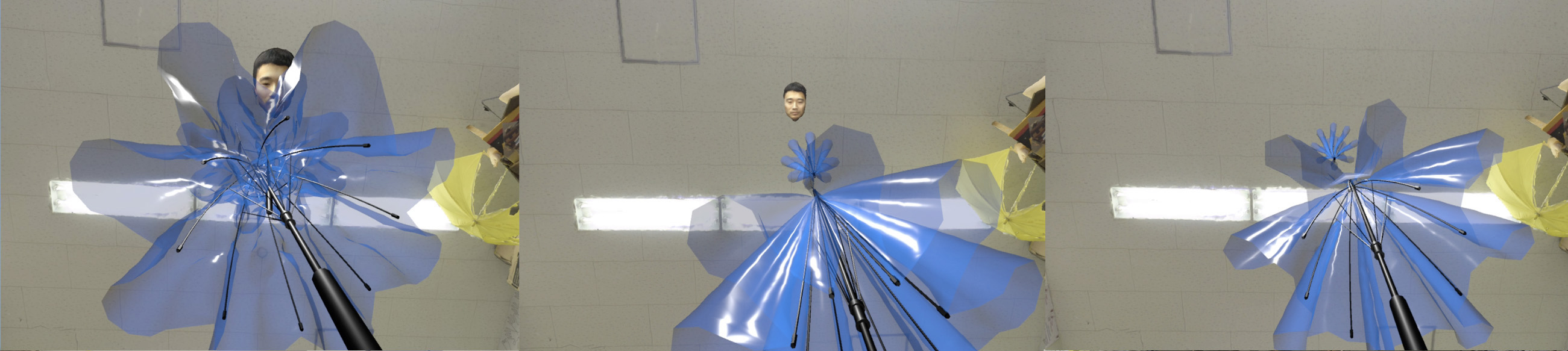
When designing an interaction between an avatar and a player in the head-mounted display (HMD) space, it is important to consider that what happens around the avatar is felt to happen directly around the player him- or herself. One resolution for interaction design is to apply the paradigm of the body ownership illusion, which is famous for the rubber hand illusion (Botvinick et al, 1998) (RHI), where visuo-tactile correlation between a rubber hand and a physical hand yields a compulsory feeling that the rubber hand is his/her own hand. The full-body illusion (Salomon et al, 2013) (FBI) applies the RHI experience to the whole body, although the FBI has some significant difficulties regarding the flexibility of designing a spatial relationship between the avatar and the player. Specifically, the avatar in HMD space should be anatomically congruent with the whole physical body. Consequently, the player is obliged to look at the back of the avatar; we cannot look face to face at an avatar during the FBI. In addition, body ownership is only influential within the "peri-personal space" (around 1-2 m) from the core of the whole body (Serino et al, 2016). It is thus impossible to project body ownership to the avatar in a general-purpose HMD interaction. We then need to find a different way of accepting the avatar as ourselves in a more flexible spatial range. 
|
|
REACTION IN EXHIBITION This system was first presented to the public at a laboratory exhibition in January 2018, where many visitors commented that they felt as if, by opening the umbrella, they blew themselves away and were blown away by themselves. Interestingly, many visitors did not become clearly aware of the reversal of the subjective direction of gravity when switching the perspective; they did not experience a subjective conflict between their physical posture (supine) and the subjective assumed posture (prone). This suggests that the supine posture can create the illusory prone posture (the typical OBE perspective) with less cognitive load, probably compared with the situation when standing or sitting. This inference is supported by the fact that no one complained of virtual-reality sickness during the trial. Thus, self-umbrelling offers a rich experience that may activate a potentially hidden cognitive function related to OBEs, bringing up important subject for designing HMD interaction between a player and an avatar. |


-
学科賞(室田ゆう「第二の肘を介した背面空間の再編成に関する研究・制作」に対して)
- 研究室展示『からだは戦場だよ2018 人間は考えヌ頭部である』, やながせ倉庫・ビッカフェ, 2018.1.27-28 [WEB]
- 室田ゆう, 森光洋, 石原由貴, 小鷹研理 :ELBOWRIST: HMDを用いた第二の肘を介した背面空間の探索, 第46回EC研究発表会, 2017.12.22, 口頭発表(ノート発表, EC2017の振替)
- 室田ゆう, 森光洋, 石原由貴, 小鷹研理 :ELBOWRIST: HMDを用いた第二の肘を介した背面空間の探索, 情報処理学会エンタテインメントコンピューティングシンポジウム(EC2017), pp114-117, 東北大学, 2017.9.18(口頭発表 + デモ発表, プレミアム枠)[PDF]
- 2018.01 古谷利裕(画家・評論家)氏によるElbowrist体験手記 [偽日記]
>>>名古屋市立大学芸術工学部・情報環境デザイン学科, 2017年度
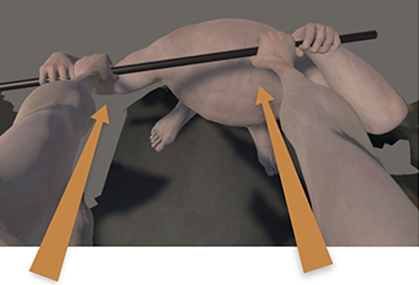
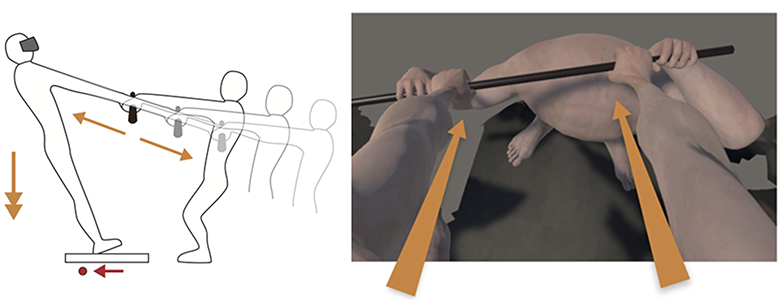
「からだは戦場だよ2018」予告の第二弾は、背面空間体感のためのHMDインタラクション、その名も「エルボリスト」です。エルボリスト(Elbow+Wrist)は、(比喩的な意味において)エイリアンの跋扈する背面を、身体認知にとって馴染みのある空間として如何に再編成していくかという問題を扱っています。 pic.twitter.com/DO8CSaMcRG
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
全てがスキャニングされた世界では、データとしての背面像にいつでもアクセスすることができるようになるはずです。そうした、遠くない未来の拡張世界の中で、進化の時間スケールに頼らず、神経系の適応プロセスの上での背面像とのつきあい方を考えることは、実に「実際的」な課題であると言えます。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
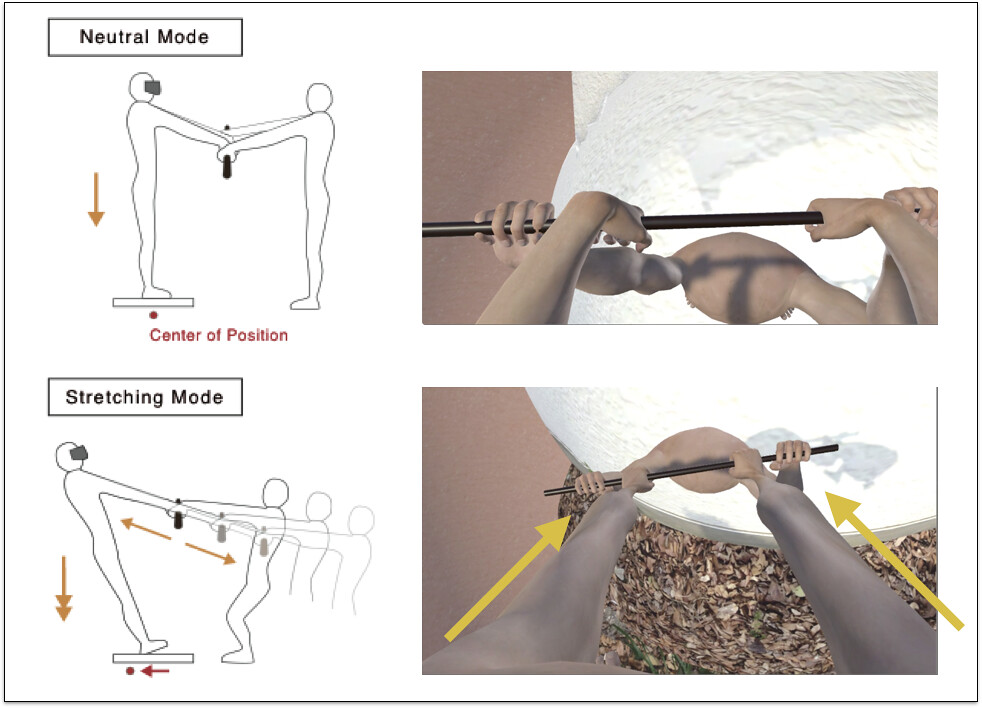
elbowristでは、手首を第二の肘のように運用し、把持した棒を背面に折り返すことで、視覚系と運動系が連合できるような背面環境を擬似的に構成している点が重要です。「動く」を排除された「見る」は、通常の意味での「見る」へと昇格することができないからです(ゴンドラ猫研究がいい事例です)。 pic.twitter.com/5tCOQL6rdC
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
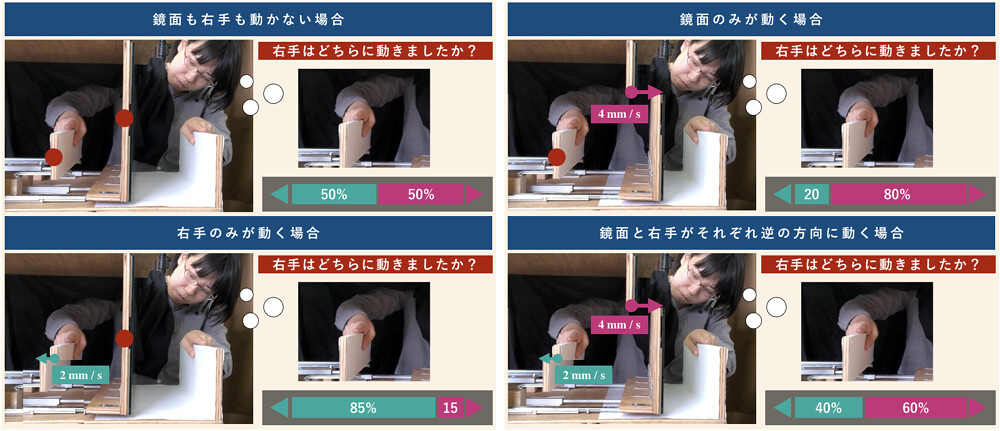
さて、elbowristには、マルチモーダル連合とは別にも、興味深い論点があります。それは<視点>に関する問題です。人間は、古来より、elbowristに頼るまでもなく、鏡を使って背面を見るということを経験してきていますが、このとき、鏡を見ている人の視線は、どちらを向いているのだろうか。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
僕の考えでは、鏡像を見る視点は、その起点において、背面へと向かわずに鏡を向いている。すなわち、文字通り<鏡を見ている>。言い換えれば、視線を構成している<抽象頭部>の向きは、前の風景を観ている時と、鏡を通して背面を観ている時とで変わらない。何も変わらない。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
一方で、エル ボリストの背面像は、頭部に位置するカメラのレンズが直接背面を向いていると想定される際に得られる像と一致している。この像を「見る」 ことができるようになるためには、背面を直接見ている180度反転した<抽象頭部>の身体像を内面化しなくてはならない。 pic.twitter.com/GXfFQeT9Fa
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
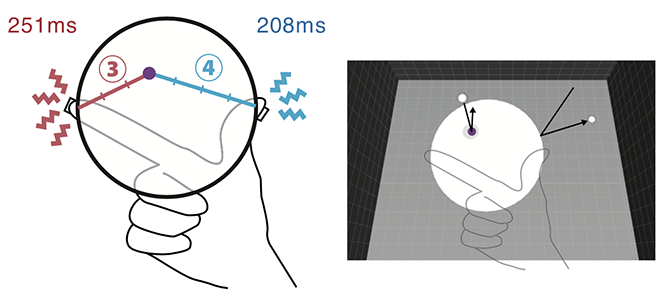
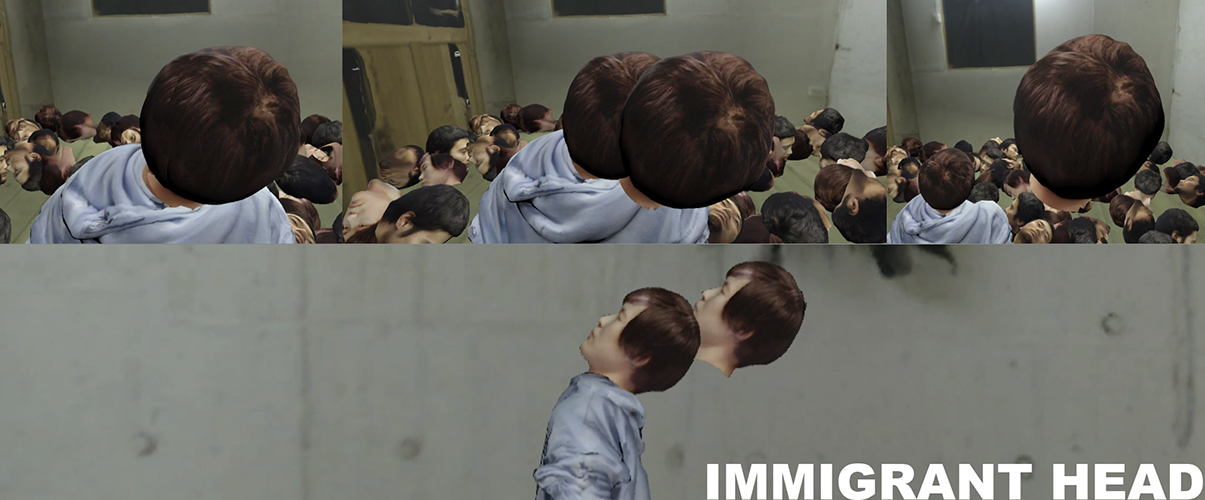
この映像がわかりやすいのだが、頭の上を横断する蝶を追いかける場合、前方から近づいて来る蝶を文字通り見上げ、その後で、後方へと遠ざかっていく蝶を、「頭を垂れる」ことによって見上げる。このとき、視線は、頭部中心から前方へ後方へ直線的に発せられる光線のようなものとして構成される。 pic.twitter.com/JzrHrsd3fv
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
エルボリストに適応した僕や、室田さんの主観世界では、まさに、そのような、「背面を直接見る」としか言いようのない事態が生じている。「視線が直接に後ろに走っている」ということが体感されている。僕は、この事態を、「抽象頭部の反転」と呼びたいと思っている。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
ここで問題としている「抽象頭部」というのは、「目が物質的に後ろについている」というような、具体的な体感とも違うし、「視線」という言葉で想起されるような純粋位相的な概念だけでも言い切れない、モノとコトの中間にあるような<半実体>のものとして、立ち現れる。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
以上の意味で、実は、elbowristは、幽体離脱の問題とも深く関わっている。頭部の保存される鏡像の体験においては幽体離脱は必要とされないが、elbowristでは、幽体離脱的な抽象頭部の離散的な空間変換を要する。優秀なエルボリストとなるためには、自分の頭部を一度捨てないといけない。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
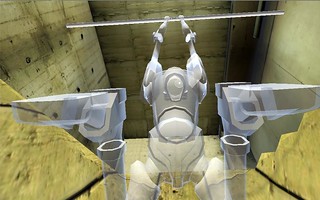
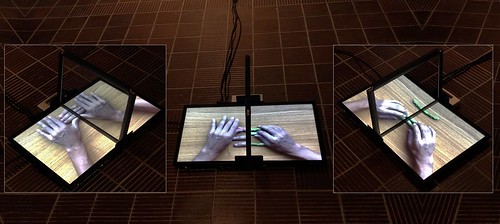
本展示では、以上の問題系をわかりやすく呈示するため、「三人称視点エルボリスト」という近視眼的な俯瞰視点を採用したものを体験できるようにしています。慣れてくれば、対面状況ある身体の像が「自分の本来あるべき位置」と体感できるようになってくるはずです。そして、これは実に奇妙な体験です。 pic.twitter.com/Clq9sHgZ91
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日
なお、elbowristは、適応するのに少し時間がかかります。人によっては、適応する前に、酔って続けられない、というケースもあると思います。5〜10分くらい、少し長めの時間をとってもらって、徐々に適応していくプロセスを味わうことを念頭に体験してもらうと、楽しんでもらえると思います。
— 「」kenrikodaka (@kenrikodaka) 2018年1月23日



- Kenri Kodaka, Koyo Mori: “Recursive Function Space: Exploring Meta-cognitive Scenery using HMD” ACM Siggraph Asia 2017, VR Showcase, Bangkok, 2017.11 [DOI]
- 小鷹研理・森光洋:「Recursive Function Space: 左手を節、右手を葉とする再帰的視点変換によるメタ認知空間の探索」, 情報処理学会シンポジウム・エンタテインメントコンピューティング2017, 東北大学, 2017.9.16 [PDF]
- 研究室展示『からだは戦場だよ2017 とりかえしのつかないあそび』, やながせ倉庫・ビッカフェ, 2017.1.29-30
- 2017.05 「雑誌・早稲田文学の古谷利裕氏による論考に「Recursive Function space」を取り上げてもらっています」 研究室ブログ
- 2017.04 「展示の記録と周辺」(「からだは戦場だよ2017」の記録) 研究室ブログ
--- Only compatible with PC browser.
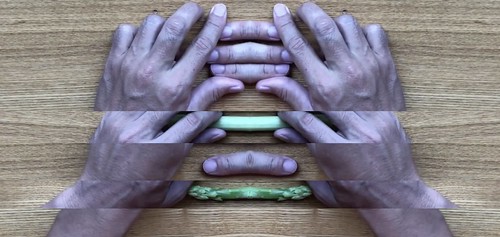
You are controlling your “left hand clone” at your left hand, and at the same time, you are controlled by your "big man" with its left hand, in the exactly same way. Here, controlling something and being controlled by something happen simultaneously. -- Recursive Function Space pic.twitter.com/iwtJLX28wR
— 「」kenrikodaka (@kenrikodaka) 2017年11月28日
--- Only compatible with PC browser.
|
◯ てはじめに。任意の変数●を含む定文「自分●を起点にしてイメージされる自分●と、他者を起点にしてイメージされる自分●の総体的な効果として、<自分の手触り>が立ち上がる。」について。その内部構造について。
◯ 上記のセンテンスにおける「自分●を起点にして」において起点とされていた自分●は、しかし、そもそも、どこかのタイミングで、あるいは、誰かしらの(「自分」という集合住宅に住まう)住人によって、その時・その位相において措定されている自分●を起点にしてイメージされた自分●ではないか。だから、自分というのは、どこまで遡っていっても自己イメージに過ぎないし、他者というのは、「それを起点にしてイメージされる自分●」からの逆演算によって見出される「イメージのイメージ」に過ぎない。そのうえで、「イメージ」と「イメージとイメージ」の間に何か特別な差異を見出そうとするのは馬鹿げているし、「イメージ」という言葉に、<まがいもの>に類するネガティブな価値を投影するのはもっと馬鹿げている。イメージの世界の豊潤さは、「自分」の不可解さと同じだけの奥行きを持ち、その全貌を捉えようとイキる者は、例外なく、その Recursive なイメージの中に取り込まれていく。 |
| Recursive Function Space (RFS) is a virtual reality based interactive contents that prominently explores and activates a meta-cognitive function in our human cognition system. RFS consists of four (RFS 1.0) or six (RFS 2.0) clones of the player (HMD wearer), characterized in a distinctive perspective transition among these clones that gives an out-of-body-like experience of seeing oneself, how one looks at oneself, and how one is looked by oneself. This is done with the HMD technology (VIVE), where pulling a lever of the left/right controller enables the player to take the perspective of the left/right hand of HMD wearer. The player can also take the perspective from the right hand of “left hand clone” or that from the “meta-clone” owning the HMD wearer at its left hand clone. Such a recursive exploration of the multiple perspectives is systematically associated with Homunculus’ infinite regress discussed in the context of “hard problem of consciousness”. Thus, RFS embodies a classically universal question concerning the origin of the subject with an up-to-date HMD technology. |


--- Only compatible with PC browser.
|
|
◯ 「HMD空間の中で自分の身体そのものをつかまえることができない」ことに物足りなさを感じてしまうのは(ほとんどのひとはそんなことはどうでもよいと考えているようなのだが)、逆から言えば、その部分にさえ目をつむれば、大方のリアリティーが再構成できてしまっているHMD技術の革新性に(結局は)由来しているのかもしれない。確かに、HMD空間の中にあって、僕たちは生々しい身体を失うことで、大きな自由を手に入れた。しかし、この自由は、(旧来からの)テレビゲームでマリオをプレイしているときに語られる水準の身体投射(sense of agency)の延長に位置するものであり、HMDという高度な玩具を手に入れながら、依然として、同じ水準で身体を運用していこうというのであれば、それはHMDの潜在的な革新性をあまりに見くびっていることになる。
|